The application of intelligent exoskeleton robots
Innovation in Intelligent Exoskeleton Technology: Micro Reduction Motor Helps Breakthrough in Human Machine Collaboration
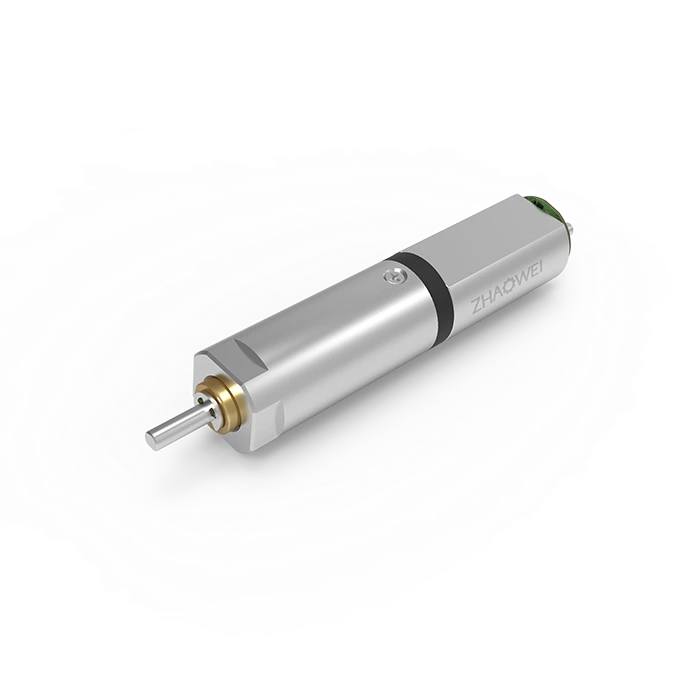
Under the wave of Industry 4.0 and intelligent medical rehabilitation, intelligent exoskeleton equipment is becoming a revolutionary product in the field of human-machine collaboration. As the core power unit of the system, the performance of the micro reduction motor directly determines the assist efficiency and user experience of the exoskeleton. Shenzhen Zhaowei Electromechanical Co., Ltd. is injecting new energy into this field with its innovative research and development of a series of micro planetary reduction motors.

(The image is generated by AI)
Exoskeleton robot technology is a comprehensive technology that integrates sensing, control, information, fusion, and mobile computing to provide a wearable mechanical mechanism for human operators. It refers to robots that are placed outside the human body, also known as "wearable robots". The motor drive system of the exoskeleton robot is located at the end of the machine's operation, responsible for driving the mechanical structure and executing specific tasks transmitted by the control system. According to different driving forms, there are mainly three types of driving methods: motor-driven, pneumatic driven, and hydraulic driven. There are advantages and disadvantages to each of the three methods, among which motor-driven is more widely used in practice. There are generally two options for using electric drive on exoskeleton robots. One solution is to directly install a disc motor on the rotating joint, and use the rotation of the motor rotor to drive the joint to rotate. This installation method has a simple structure and is easy to maintain and disassemble. However, adopting this approach will make the rotating joints of exoskeleton robots very bulky, and coupled with limited installation space, they often cannot achieve ideal output driving force due to motor size limitations. Therefore, this approach is mostly used on laboratory prototype machines for related experimental research. Another solution is to use an electric push rod drive, which is connected to the exoskeleton at both ends of the electric push rod with connecting ears, converting the rotational motion of the electric motor into linear motion of the push rod and pushing the rotating joint to rotate. Electric push rods are generally composed of an electric motor and a lead screw, usually using a DC motor. The principle is that the rotation of the electric motor drives the nut of the lead screw to rotate, and then the nut uses the principle of a screw pair to push the lead screw to make linear motion, so that the lead screw drives the legs, calves, and feet of the exoskeleton robot to rotate around the hip joint, knee joint, and ankle joint respectively, improving the flexion and extension motion of the hip joint, knee joint, and ankle joint in the sagittal plane. Zhaowei Company is committed to researching, designing, and manufacturing exoskeleton robot motor gearbox products, and providing customized development services.