










Innovation in Intelligent Exoskeleton Technology: Micro Reduction Motor Helps Breakthrough in Human Machine Collaboration Under the wave of Industry 4.0 and...
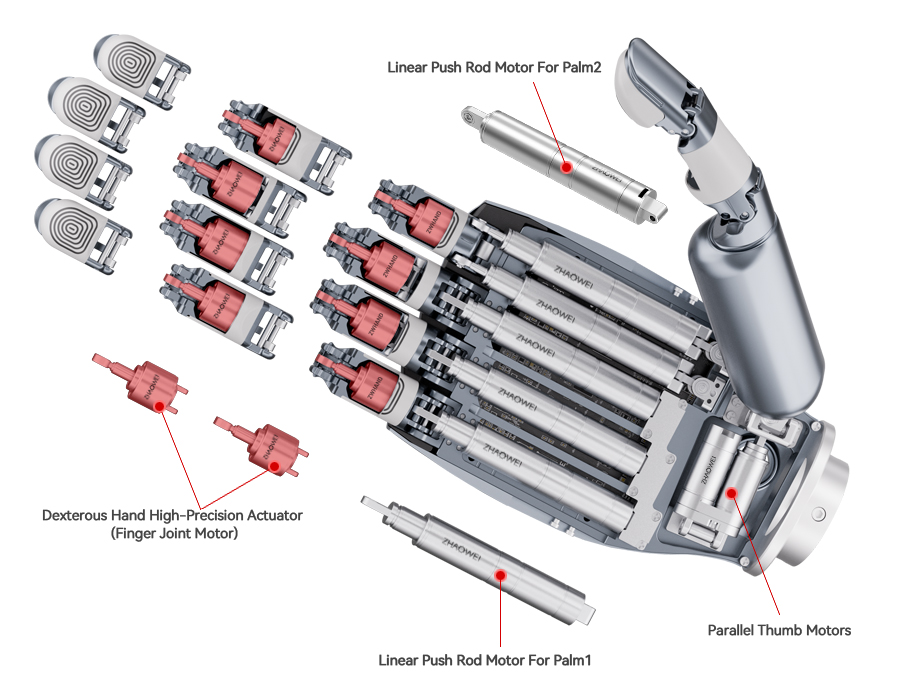
Dexterous Hand High-Precision Actuator (Finger Joint Motor)
Model: GM24004-01
ZHAOWEI’s Finger Joint Motor provides a reliable and scalable solution for next-generation robotic finger actuators, empowering advanced robotic systems with enhanced flexibility, precision, and performance.
- Diameter
- 14mm
- Voltage Range
- 12VDC
- Weight
- 12g
- Stroke Time
- 15±15% mm/s
- Stroke
- 6mm(MAX)
- Torque
- 10±15%N
- Operating Temperature
- -40~+85 ℃
Application:
·robot joint ·Robotic dexterous hand ·Biomimetic robots
·robotic arms ·precision instruments ·industrial automation
·medical robots etc.










Actuator parameters:
| Voltage | 12 | VDC |
|---|---|---|
| Rounte (Max) | 6 | mm |
| Rated Push/Pull Force | 10 | N |
| Rated Current (MAX) | 0.6 | A |
| Rated moving speed(600PPS) | 15±15% | mm/s |
| Instantaneous allowable pushing and pulling force |
15 | N |
| External diameter | φ14 | mm |
| Actuator length | 11.8 | mm |
| Recommended temperature range | -40~+85 | ℃ |
| Weight | 12 | g |
| Lead length (L0) | 50/98/175 | mm |
* The above specifications are subject to change without prior notice. They are for reference only and can be customized as required.
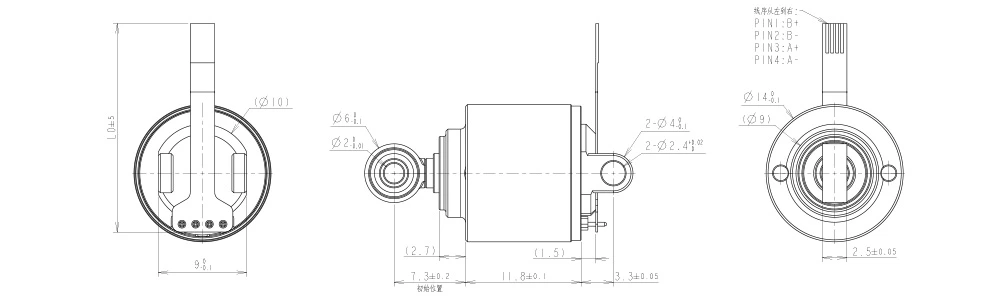
Drawing:
Robot Drive Products
Product Application
>>More
Robot Joint Gearbox
In order to meet the needs of various types of robot joints developed with modern high-tech, ZHAOWEI provides different gear motor specifications of robot joint...

Gearboxes for Automatic Feeder
In order to support the application of smart feeding technology, ZHAOWEI develops gear drive systems for automatic feeders of various kinds....