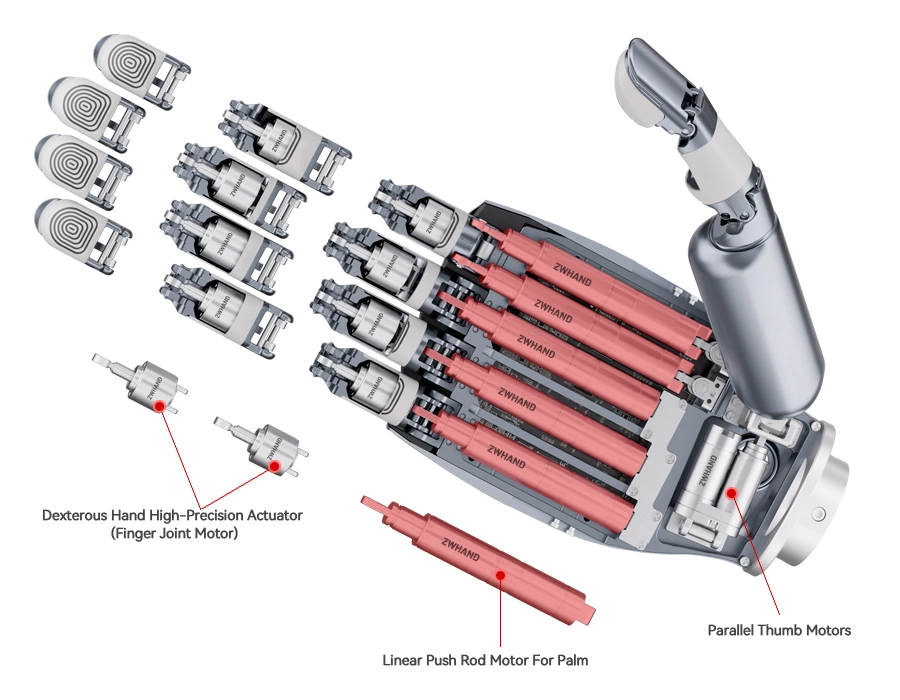
Linear Push Rod Motor For Palm
Project Background:The palm usually has a rigid or passively flexible fixed structure. This limits its adaptability, stability and strength in grasping. A linear push-rod motor is placed in the palm, and its main goal is to actively simulate and enhance the functions of the palm.
- Diameter
- 12mm
- Rated Voltage
- 12VDC
- Weight
- 42g
- Stroke Time
- 32.8±15% mm/s
- Stroke
- 11mm(MAX)
- Operating Temperature
- -40~+85℃






Actuator parameters:
| Gearbox Stages | 1 | / |
|---|---|---|
| Voltage | 12 | VDC |
| No-load Current | 0.1±15% | A |
| Empty-load Moving Speed | 46±15% | mm/s |
| Stroke(Max) | 11 | mm |
| Rated Push/Pull Force | 54±15% | N |
| Rated Current | 0.45±15% | A |
| Rated Linear Speed | 32.8±15% | mm/s |
| Maximum Instantaneous Push/Pull Force(Max) | 160 | N |
| Reduction Ratio | 6.6 | / |
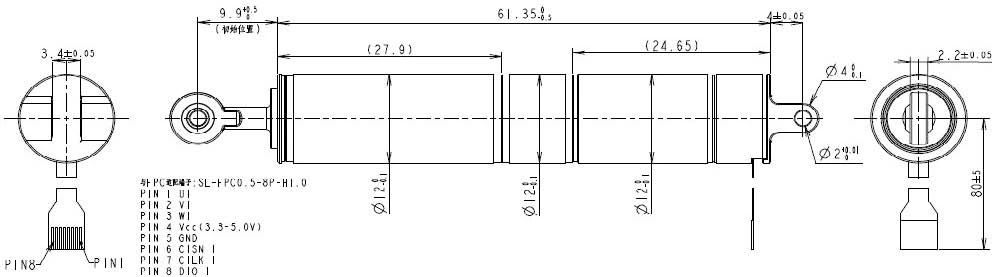
| Diameter | 12 | mm |
| Actuator Length | 61.35 | mm |
| Recommended temperature range | -40~+85 | ℃ |
| Weight | 42 | g |
* The above specifications are subject to change without prior notice. They are for reference only and can be customized as required.
Drawing: