Robot Dog Motor Parameters
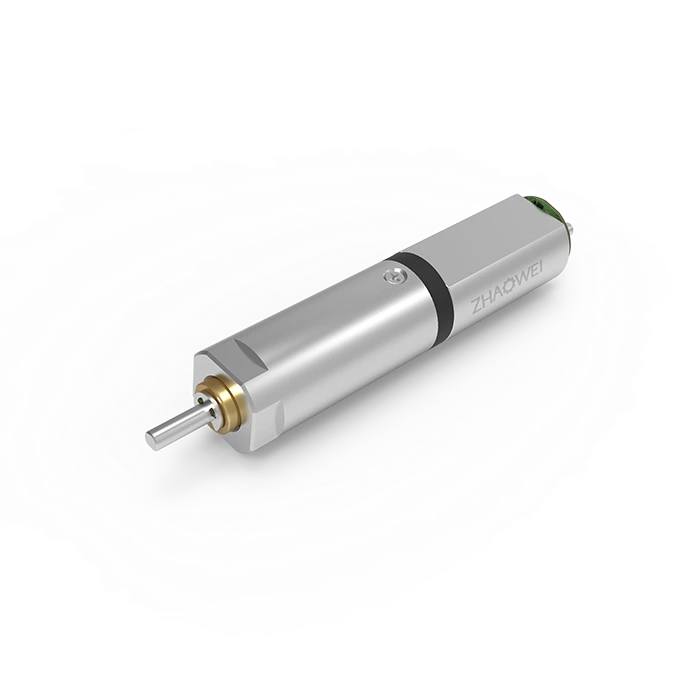
The robot dog motor is a micro gear motor transmission system used for the intelligent robot dog joint drive. The main transmission structure is composed of drive motor (micro motor) and gearbox (reducer). Robot dog joint motor can drive the robot dog to adaptively walk. It enables the robot dog to climb slopes and walk on graveled path. Moving forwards, backwards, upwards, downwards, the yaw angle, pitch angle and roll angle can be controlled when walking on an uneven terrace. This kind of technical parameters need to be customized, such as output power, output torque, noise, precision, gearbox transmission mode, drive motor performance. ZHAOWEI Machinery & Electronics Co., Ltd is committed to providing a comprehensive customization service.
Parameters of Robot Dog Motor:
| Material | Metal |
|---|---|
| Outer diameter | 24mm |
| Operating temperature | -20℃~+100℃ |
| Direction of rotation | cw&ccw |
| Gear backlash | ≤3° |
| Voltage (Optional) | 3V~24V |
| Bearing | Porous bearing/Rolling bearing |
| Input speed | ≤15000rpm |
| Axial endplay | ≤0.3mm/≤0.2mm |
| Current | 300mA max |
| Radial load on output shaft | ≤120N/≤170N |
| Motors (Optional) | Stepper/DC Motor |
Customization
Project Name: Robot Joint Motor
Project Background: In the rapid response interaction and communication, the gear dc motor for robot is used to drive the joints of the robot, which requires a large power-to-mass ratio and torque-to-inertia ratio, high starting torque, low inertia, and a wide and smooth speed adjustment range. In particular, the robotic gripper should use a robot motor with a small volume and mass, and a large overload capacity in a short time.
Achievement: The robot is combined with ZHAOWEI planetary robot servo motor, which can greatly improve the quality and efficiency of the robot. The gear DC motor for robot has two-stage, three-stage, and four-stage transmission changes. The reduction ratio, input speed and torque of the gearbox can be adjusted according to the design requirements of the robot motor.