Every motor converts power. Electric motors convert electrical power into motion, stepper motors convert electrical power into rotation. Stepper motor can not only convert electrical power into rotation, but also control the distance and speed of rotations accurately.
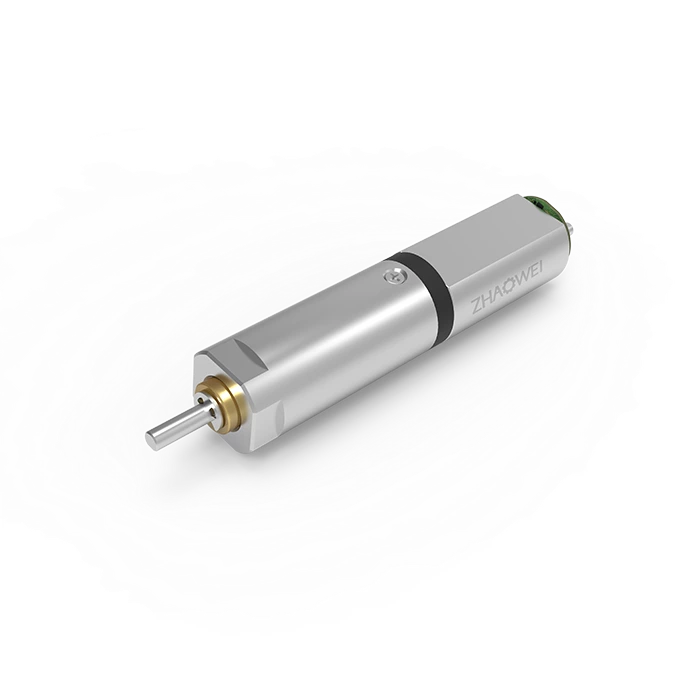
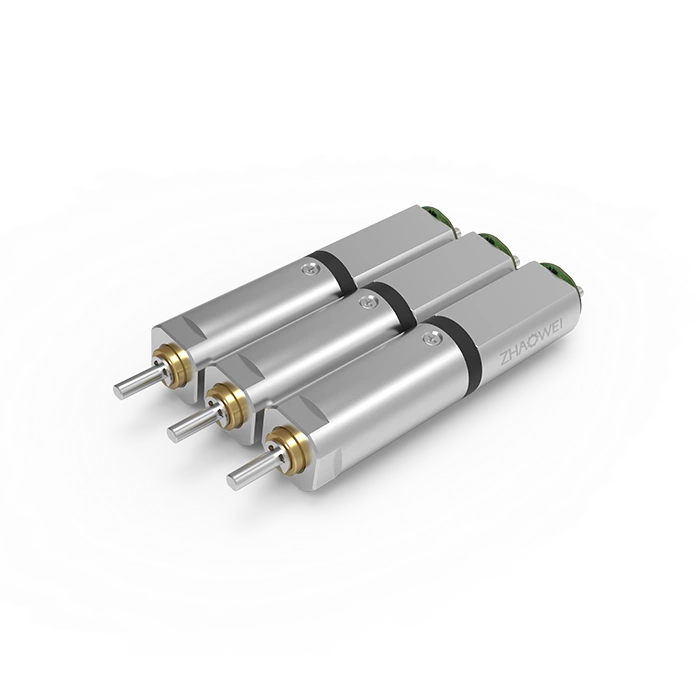
Micro stepper motors are often divided into three types: permanent magnet stepper motors (PM), variable reluctance stepper motors (VR) and hybrid stepper motors (HB). No matter the type of stepper motor, they’re equipped with a stationary part (the stator) and a moving part (the rotor).
We’ll take a permanent magnet stepper motor for example. The rotor of the screw stepper motor is a permanent magnet. When current flows through the stator winding, the stator winding generates a vector magnetic field. The magnetic field drives the rotor to rotate at an angle so that the direction of the pair of rotor magnetic fields is consistent with the direction of the stator’s. When the stator’s vector magnetic field rotates at an angle, the rotor turns an angle with the magnetic field. Each time an electric pulse input, the motor rotates an angle to advance. The angular displacement output by the screw stepper motor is proportional to the number of input pulses, and the speed is proportional to the pulse frequency. Changing the winding energization sequence reverses the motor. Therefore, the rotation of the stepper motor can be controlled by controlling the number of pulses, frequency, and the energizing sequence of each winding phase of the motor.
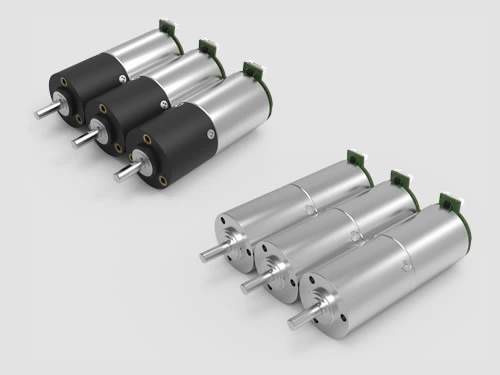
Various motors commonly seen in the heating principle of screw stepper motors contain iron cores and winding coils. There is resistance in the winding, and loss will occur when energized. The loss is proportional to the resistance and the square of the current. We often refer to this as “copper loss”. If the current is not a standard DC or sine wave, a harmonic loss will also occur. The core has a hysteresis eddy current effect, and it also produces losses in the alternating magnetic field. These losses are called iron losses, which are related to the material, current, frequency and voltage. Both copper loss and iron loss are expressed in the form of heat, which affects motor efficiency. The efficiency is relatively low, the current is generally large, and the harmonic content is high. The frequency of alternating currents also changes with speed, causing the stepper motor to generate heat while running. Recently, manufacturers, including ZHAOWEI, have started to focus on relying on technology to improve the reliability of their products. Advantages include high precision, easy control, and low-noise, suitable for high precision instruments, electric curtains, and robots.