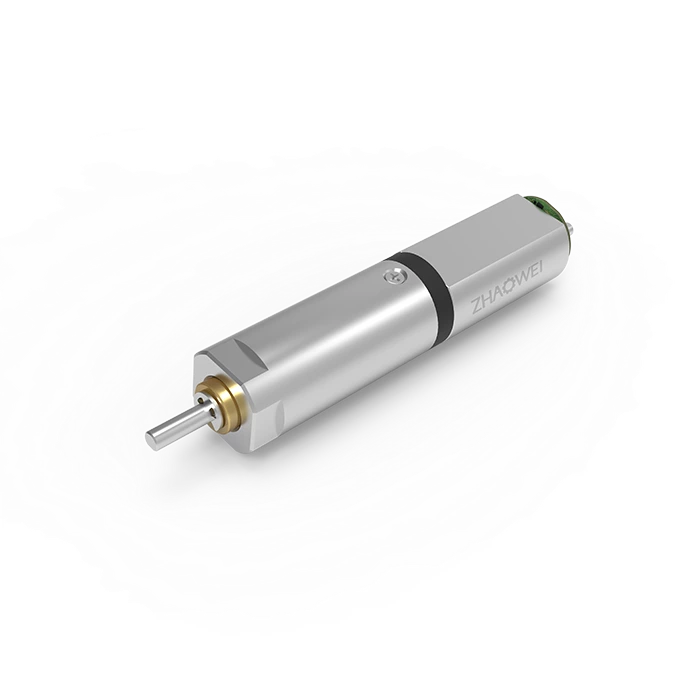
The hard-tooth surface gear reduction motor saves space, is reliable and durable, and has strong overload capacity. Its high power can reach 132KW, its low power can reach 0.5W. The gear reduction motor has an efficiency of up to 95%, low energy consumption, and great performance. It also has low vibration, low-noise, and high energy efficiency. Gear reduction motors, also known as gear motors, refer to a combination of micro gearboxes and motors. The product adopts a systematic and modular design concept, and has a wide range of adaptability to meet the needs of our clients.
Working Principle:
The gear reduction motor is a general motor combined with a gear reducer in front of it. The reducer is generally used in low-speed and high-torque transmission devices, and reduces speed by meshing between the gears with a small number of teeth on the input shaft of the reducer, and large gears on the output shaft. A general gear motor has several pairs of gears, which can achieve an ideal deceleration effect under the same working principle. The gear ratio in the transmission is the ratio of the number of teeth of the large and small gears. According to the transmission mode, gear reduction motors can be classified into unfolding, shunt, and coaxial gear reduction motors.
1. Unfolding type
The high-speed series uses long-tail helical gears, and the low-speed series uses straight or helical gears. Due to the asymmetrical arrangement of the gears relative to the bearings, the rigidity of the shaft is required, and the torque input and output ends are far away from the gear, reducing the uneven load distribution along the tooth width caused by the bending deformation of the shaft. It has a simple structure and is widely used.
2. Shunt type
High-speed shunts are generally used. Gears are arranged symmetrically relative to bearings, so the forces acting on the gears and bearings are uniform. In order to reduce the total axial force on the shaft, the helical direction of the two pairs of gears should be opposite. The structure is more complex, and is often used in applications with high power and variable load.
3. Coaxial type
The axial size of the gear motor is larger, and the intermediate axis is longer. The rigidity is relatively poor. When two large gears are immersed in similar depths, the bearing capacity of the high-speed gears cannot fully develop. Coaxial types are often used where the input and output axes are coaxial.

Features of Gear Reduction Motor
- Compact structure, reliable and durable, strong overload resistance capability, and large power.
- Low energy consumption, great performance, efficiency up to over 95%.
- Low vibration, low noise, and high energy-efficiency. It uses a high-quality steel section and steel cast iron box. The high-end gear reduction motor uses a special die-cast aluminum alloy box, whose gear surface suffers high-frequency heat treatment.
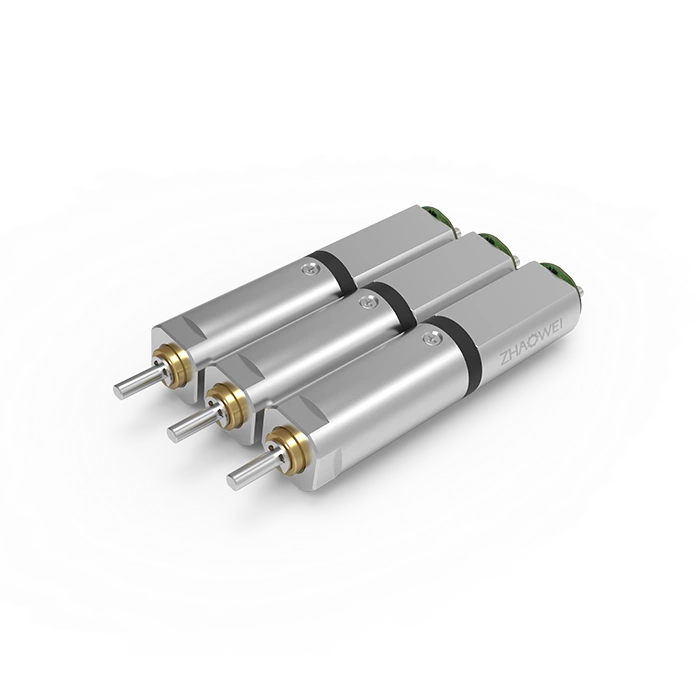
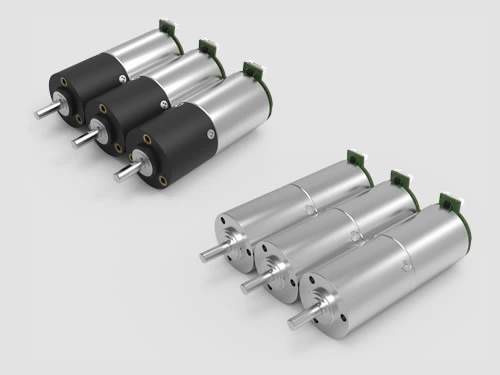
- Precision machining improves the positioning accuracy. The drive assembly gear reduction motor can be configured with various mainstream motors on the market, forming a new product feature of mechatronics and modular structure, which fully improves the product quality.
- The product uses a serialization and modularization design concept with a wide range of adaptability. It can be combined with motors, installation positions, and structural schemes. The gear reducer can choose any speed and various structural forms according to actual needs.
Key Points of Gear Reduction Motor Selection
- The basic conditions for a reasonable selection of gear motor are rated voltage, rated speed, and rated torque.
- The highest efficiency point in the performance index introduced in the parameter table of each model refers to the rated speed and rated torque for reference. The rated working point of the gear reduction motor is an important basis for motor design. When working near the rated point, it has high working efficiency and stable performance.
- In the case of large reduction ratio and low speed, please refer to the maximum permissible load and speed listed in the property parameter table. Running under the maximum permissible load and speed conditions will reduce the service life of the reducer, or directly damage the gear reducer.
- The selected motor should be tested on a prototype before batch use to confirm if the rated speed, rated torque, voltage, and current meet the conditions. If the deviation is close enough, the motor can be considered reasonable. If the deviation is large, the motor needs to be replaced, otherwise the service life and quality cannot be achieved.
- High-power gear reduction motors are widely used as indispensable power devices for mechanical equipment, especially in packaging machinery, printing machinery, corrugated machinery, color box machinery, transport machinery, food machinery, three-dimensional parking equipment, automatic storage, three-dimensional warehouse, chemical industry, textile, dyeing, and finishing equipment.
- Low-power micro gear motors can be used in precision medical equipment, intelligent robot, 5G communications equipment, intelligent logistics, smart city, smart automobiles, printing machine, flame cutting, laser cutting, CNC machine tools, industrial instruments, food packaging, automation industry, aviation equipment, semiconductor equipment, medical equipment, robot, manipulator, and communication equipment.