Micro Robot Motor Parameters
Intelligent robots have several kinds of internal & external receptors, giving them vision, hearing, touch, and smell. In addition, they also have effectors that allow them to react to the surrounding environment. The effector is generally recognized as a “muscle” or self-stepping motor, which causes movement in hands, feet, nose, and tentacles. In other words, an intelligent robot must have at least three elements: sensory, reactive, and thinking elements.
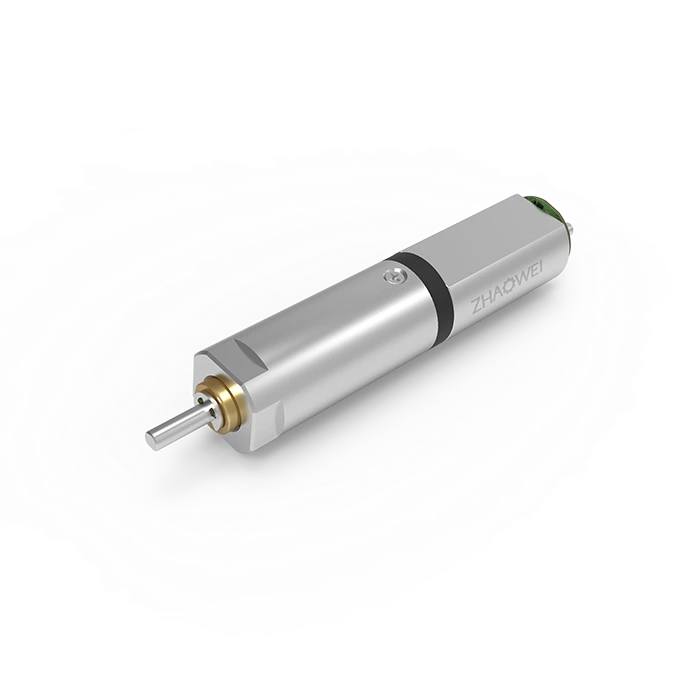
The micro robot servo motor is a low-power micro gear motor, which can be used on intelligent robot transmission systems. The main transmission structure consists of a drive motor and a gearhead (reducer). A brush DC motor, BLDC motor, coreless motor, stepper motor, or servo motor can be used as a driving source of the drive motor. A planetary gearhead, cylindrical gearhead, general gearhead or worm gearhead can be used as a reducer. Different gear motors can be used on different types of micro robots. Parameter customization include output power, voltage, reduction ratio, output torque, output speed, noise, and transmission precision.
ZHAOWEI Machinery & Electronics Co., Ltd provides a set of customized development services. The customized technical parameters of robot joint motor provided by ZHAOWEI are as below:
Diameter: 3.4mm-38 mm
Voltage: ﹤24V
Output power: ﹤50W
Output speed: 5-2000rpm
Gear ratio: 5-1500
Output torque: 1 gf.cm-50 kgf.cm
Parameters of Gear Motor for Micro Robot:
| Material | Metal |
|---|---|
| Outer diameter | 28mm |
| Operating temperature | -20℃~+85℃ |
| Direction of rotation | cw&ccw |
| Gear backlash | ≤3° |
| Voltage (Optional) | 3V~24V |
| Bearing | Porous bearing/Rolling bearing |
| Input speed | ≤15000rpm |
| Axial endplay | ≤0.1mm/≤0.1mm |
| Current | 300mA max |
| Radial load on output shaft | ≤120N/≤170N |
| Motors (Optional) | Stepper/Coreless/BLDC Motor |
Customization
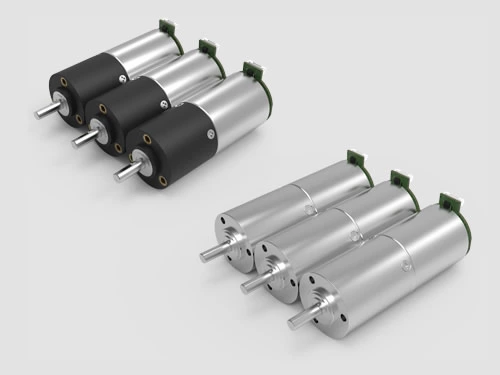
Project Name: Gear Motors for Wheeled Robots
Project Description: Intelligent robots are able to act according to pre-programmed formulas, or guidelines formulated by AI technology. Mature intelligent robots can replace manual labor, including production, construction, or high-risk jobs. Robots can be differentiated into wheel types, leg types, crawler types, snake types, or compound types according to their movements. Wheeled mobile robots account for a relatively large portion of autonomous mobile robots. They have fast movements, simple control, and are widely used in automatic palletizing production lines and unmanned vehicles.
Technical Difficulties: 1. Wheeled mobile robots have a poor turning ability 2. Wheeled mobile robots have a poor climbing ability, limiting the use of this DC-motorized robot.
Achievement: The driving part of the wheeled mobile robot uses a DC motor and a 38mm planetary gearhead, which are installed anti-symmetrically. This method can make the wheel set coaxial, and gives greater power (the size and power of motor are generally proportional to a certain ratio). This reduces the stress point on the reducer’s output shaft, shortens the wheelbase significantly, and saves space, making the robot compact.