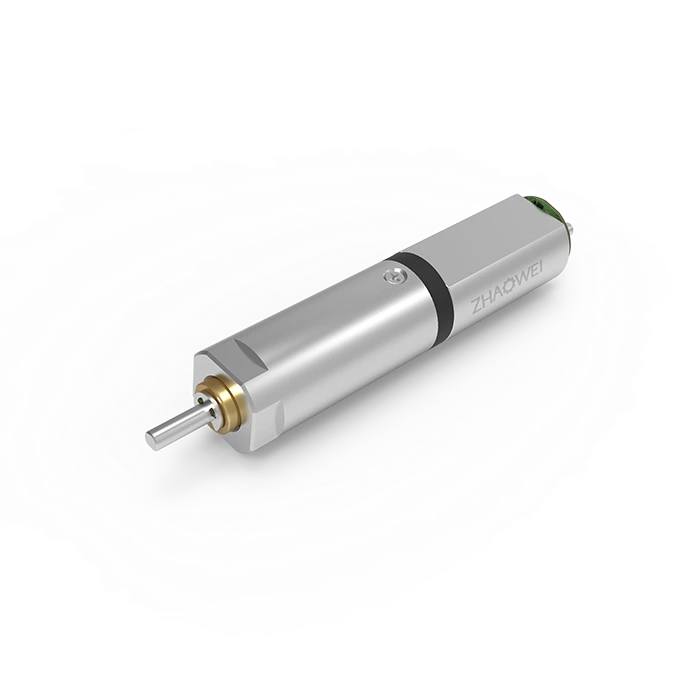
Geared Motors for Robot Finger Parameters
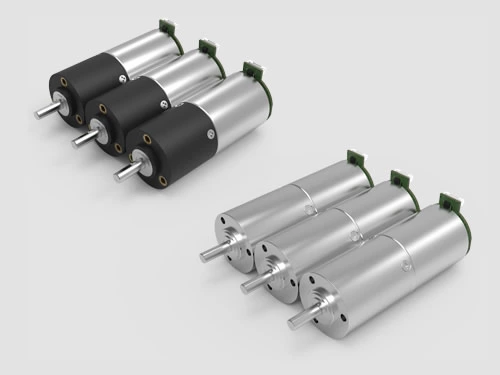
As the end actuator of the robot, the robot hand is an automatic device that imitates the hand movement of the person and realizes automatic grasping, handling, and operation according to a set program, trajectory planning, and requirements. As a traditional task agency, robots play a key role in both industrial robots and service robots. In order to improve the flexibility of the robot, the miniature DC motor consisting of drive motor and gearbox is widely adopted, which is a transmission module with functions of deceleration, transmission, and increasing torque.
The micro DC motors for robot fingers are usually customized for development. The range of parameters is:
Diameter: 3.4mm-38 mm
Voltage: ﹤24V
Transmission noise: ﹤45dB
Output speed: 5-1500rpm
Gear ratio: 5-2000
Gearbox rotation accuracy: within 2 arc minutes
ZHAOWEI is committed to research and development, design, and manufacture of miniature precision gearboxes and provides a complete set of customization services.
Successful Case: Robot Joint
Technical problem: The need for transmission efficiency and noise reduction of the robot joint can be realized after complicated debugging.
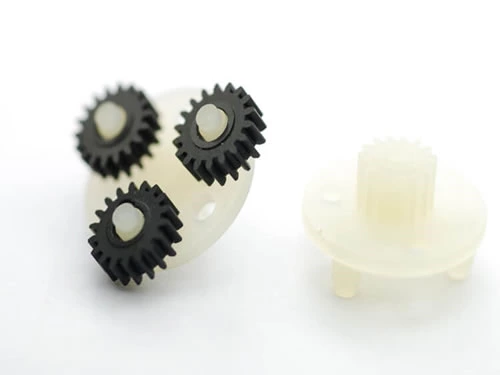
Technical scheme: ZHAOWEI optimizes the gear displacement coefficient and the interference check of planetary gears, improves the efficiency of the joint motor and makes the joint motion of robot more flexible.
Achievements: DC geared motors are used in the joints of transmission robots. They require a large torque-to-inertia ratio, high starting torque, low inertia, and a wide range of speed. In particular, the robot end actuator should be small in size and mass and have a joint motor with a short-time overload capability.