What are Geared Stepper Motors?
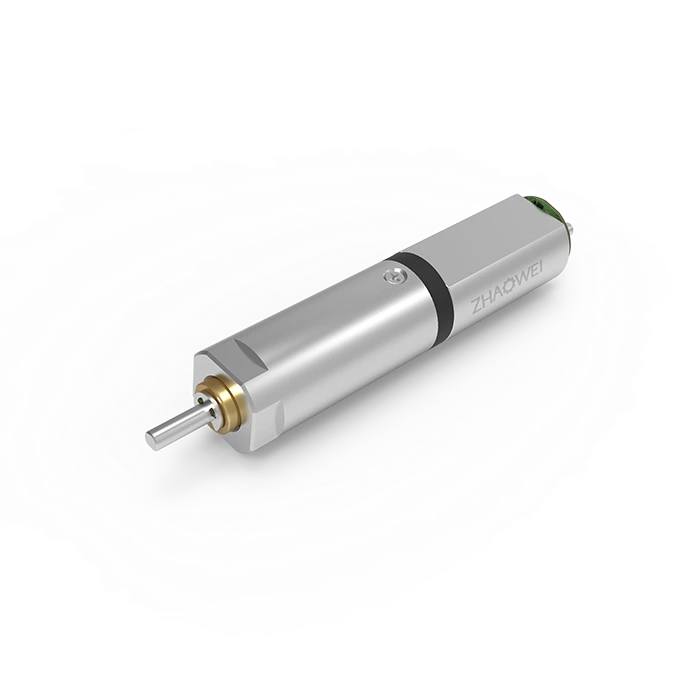
This phrase might be unfamiliar to some, but geared stepper motors generally refer to stepper motors with gearboxes or gearheads. Previously, we explained what stepper motors are, and how they work. By now, we understand that gearboxes are usually used to change speed and torque. In other words, a geared stepper motor is a brushless DC motor that uses gears to change its speed and torque (generally reducing speed, increasing torque), dividing the complete rotation into separate steps.
Basic Working Principle
If connected to a DC power supply, the brushed DC motor will continue to rotate, but the geared stepper motor will not. It converts the input pulse into a precisely defined increment in the shaft position. Each pulse moves the shaft at a fixed angle. This means that for every pulse input, the rotator will move one step or rotate at a fixed angle. The rotating speed is proportional to the pulse frequency. Therefore, the rotational speed can be controlled by changing the frequency of the input pulse to achieve precise positioning.
Category
There are various standards when it comes to classifying geared stepper motors. According to the source of magnetic force, they can be divided into three types: permanent magnet steppers, variable reluctance steppers, and hybrid synchronous steppers. If classified according to the gearbox of the stepper gear motors, planetary gearbox stepper motors is the most common (you may check some examples of 1.5-12V geared stepper motors).
Why Choose Geared Stepper Motors?
Stepper motors, or step/stepping motors, are known for their precise positioning capabilities and high torque output at low speeds, but their size needs to be carefully verified to match the load and application parameters, and to minimize the possibility of out-of-step or motor stalling. By adding a gearbox to a stepper motor system, the motor performance improves by reducing the ratio of the load to the motor inertia, increasing load torque, and reducing motor oscillation.
- Reduce Inertia Ratio
One of the reasons for the lack of stepping in stepper motor applications is inertia. The ratio of load to motor inertia determines how the motor drives or controls the load, especially in the acceleration and deceleration parts of the motion curve. If the load inertia is significantly higher than the motor inertia, it will be difficult for the motor to control the load, and overshoot (the number of overspeed steps is beyond the command range), or undershoot (the number of underspeed steps) may occur. The high load inertia ratio may also cause the motor to consume too much current and stall. One way to reduce the inertia ratio is to use a larger inertia motor. This, however, means higher costs, heavier weight, and impact on other parts of the system (such as couplings, cables, and drive components). A gearbox is, instead, added to the system to reduce the inertia ratio of the load to the motor through the square of the gear ratio.
- Increase Torque
Another reason for using gearboxes with stepper motors is to increase the torque to drive the load. When the load is driven by a high-torque DC brushless gear motor, the gearbox multiplies the torque of the motor by an amount proportional to the gear ratio and gearbox efficiency. .
- Reduce Vibration
Compared with a stepper motor with a gearbox, the vibration of a geared stepper motor is significantly smaller, especially at low speeds in the resonance frequency range. Overall, a geared stepper motor has the following advantages:
- Precise positioning. Backlash can be limited to 3%.
- Brushless. It saves cost and improves service life since there’s no need to change the brush, and the service life is only determined by the life of the shaft.
- High torque available. Equipped with the gearbox, the geared stepper motor is enabled with high torque. Torque is customizable since the gear ratio can be modified.
For geared stepper motor customization and application, you can check parameters and customized development of geared stepper motor for more details.