Gear Motor for Robotic Gripper Parameters
A robotic gripper denotes an automatic operation device that can imitate the hand and arm of some action functions to grasp fixed procedures, carry objects, or handle tools. The robotic gripper is the earliest industrial robot and also the earliest modern robot, which can replace heavy manual labor to attain mechanization and automation of production and operate in a detrimental environment to protect personal safety. The robotic gripper is primarily divided into two parts, the arm and the robotic end-effector. The arm uses joint movement to drive the end-effector to reach the preset position for the preset operation.
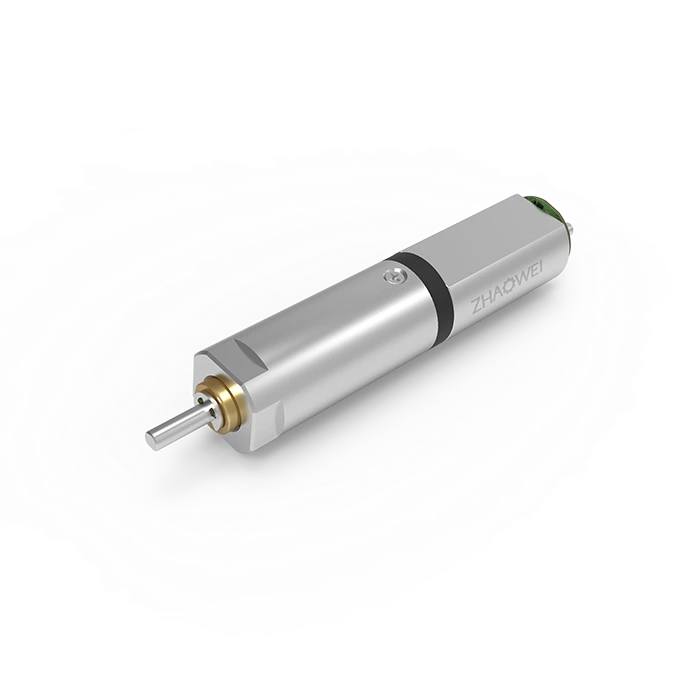
The gear DC motor for the robot gripper is a small-power micro transmission gear motor, whose main transmission structure is assembled by a drive motor (micro motor) and planetary gearbox (reducer), short for “robotic gripper motor.” It is applied to the transmission module of the robotic arm and gripper. The drive motor can adopt a DC motor, brushed motor, BLDC motor, servo motor, stepper motor, coreless motor, and micro motor as the driving source, whereas the micro gearbox can adopt a planetary gearhead, cylindrical gearhead, and worm gearhead as the reducer. The technical parameters are often customized for developments, including the output power, gear ratio, output torque, voltage, type of driving motor, gearbox structure, transmission noise, and transmission precision.
ZHAOWEI Machinery & Electronics Co., Ltd., provides a set of customized development services. The customized technical parameters of micro robot gear motors provided by ZHAOWEI are as follows:
Diameter: 3.4mm-38 mm
Voltage: ﹤24V
Output power: ﹤50W
Output speed: 5-1500rpm
Gear ratio: 2-2000
Output torque: 1.0 gf.cm -50kgf.cm
Parameters of Micro Gear Motors for Robotic Grippers:
| Material | Metal |
|---|---|
| Outer diameter | 22mm |
| Operating temperature | -30℃~+100℃ |
| Direction of rotation | cw&ccw |
| Gear backlash | ≤2° |
| Voltage (Optional) | 3V~24V |
| Bearing | Porous bearing/Rolling bearing |
| Input speed | ≤15000rpm |
| Axial endplay | ≤0.1mm/≤0.1mm |
| Current | 300mA max |
| Radial load on output shaft | ≤120N/≤170N |
| Motors (Optional) | Stepper/Coreless/BLDC Motor |
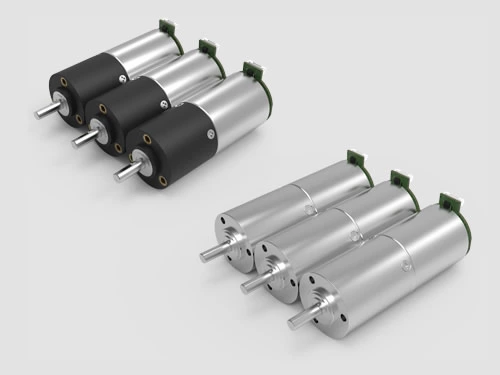
Project Name: Gearbox for Robot Joints
Project Background: a DC gear motor is used to mediate communication and rapid response to driving the robot joints, which needs a larger power-to-weight ratio and torque-to-inertia ratio, higher starting torque, low inertia, and wide & smooth speed adjustable range. Particularly, the robotic end-effector (gripper) should adopt the joint motor with compact size, lightweight, and large short-time overload capacity.
Project Introduction: Based on the development and exploration of abrasion-proof material technology, processing optimization techniques, lubrication technology, packaging technique, life testing technology, and transmission mechanism, ZHAOWEI develops and manufactures micro-robot joint gearboxes to enhance the performance of the intelligent robot, including perception and identification, mechanism and transmission, control, and interaction. The full range of precision robots adopts gear motor with planetary gearhead whose parameters can be customized (diameter: 3.438mm, power: 0.0140W, output speed: 52000rmp, gear ratio: 51500, output torque: 1.050kgf.cm).